#include <HeadingCar.hpp>
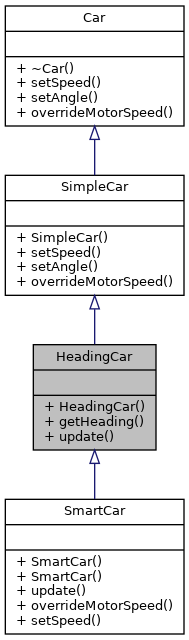
Inheritance diagram for HeadingCar:
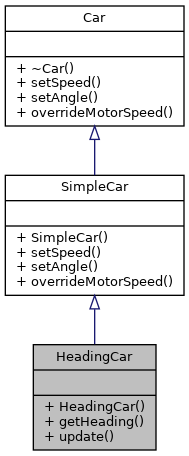
Collaboration diagram for HeadingCar:
Public Member Functions | |
| HeadingCar (Control &control, HeadingSensor &headingSensor) | |
| Constructs a car equipped with a heading sensor. More... | |
| int | getHeading () |
| Returns the car's current heading in degrees [0, 360) More... | |
| virtual void | update () |
| Updates the readings from the heading sensor. More... | |
 Public Member Functions inherited from SimpleCar Public Member Functions inherited from SimpleCar | |
| SimpleCar (Control &control) | |
| Constructs a simple car. More... | |
| void | setSpeed (float speed) override |
| Sets the car's driving speed as a percentage of the motors total speed where the sign indicates direction. More... | |
| void | setAngle (int angle) override |
| Set the car's driving angle. More... | |
| void | overrideMotorSpeed (int firstMotorSpeed, int secondMotorSpeed) override |
| Set the motor speed individually as a percentage of the motors` total power. More... | |
| Public Member Functions inherited from Car | |
| virtual | ~Car ()=default |
Detailed Description
A class to programmatically represent a vehicle equipped with a heading sensor
Definition at line 10 of file HeadingCar.hpp.
Constructor & Destructor Documentation
◆ HeadingCar()
| HeadingCar::HeadingCar | ( | Control & | control, |
| HeadingSensor & | headingSensor | ||
| ) |
Constructs a car equipped with a heading sensor.
- Parameters
-
control The car's control headingSensor The heading sensor
Example:
BrushedMotor leftMotor(smartcarlib::pins::v2::leftMotorPins);
BrushedMotor rightMotor(smartcarlib::pins::v2::rightMotorPins);
DifferentialControl control(leftMotor, rightMotor);
ArduinoRuntime arduinoRuntime;
const int GYROSCOPE_OFFSET = 37;
GY50 gyroscope(arduinoRuntime, GYROSCOPE_OFFSET);
Definition at line 3 of file HeadingCar.cpp.
Member Function Documentation
◆ getHeading()
| int HeadingCar::getHeading | ( | ) |
Returns the car's current heading in degrees [0, 360)
- Returns
- The car's current heading in degrees
Example:
auto currentHeading = gyroscope.getHeading();
Definition at line 9 of file HeadingCar.cpp.
Here is the call graph for this function:

◆ update()
|
virtual |
Updates the readings from the heading sensor.
You must have this being executed as often as possible to get accurate heading readings.
Example:
void loop() {
// Update the car readings as often as possible
car.update();
// Other functionality
}
Reimplemented in SmartCar.
Definition at line 14 of file HeadingCar.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- src/car/heading/HeadingCar.hpp
- src/car/heading/HeadingCar.cpp
