#include <Car.hpp>
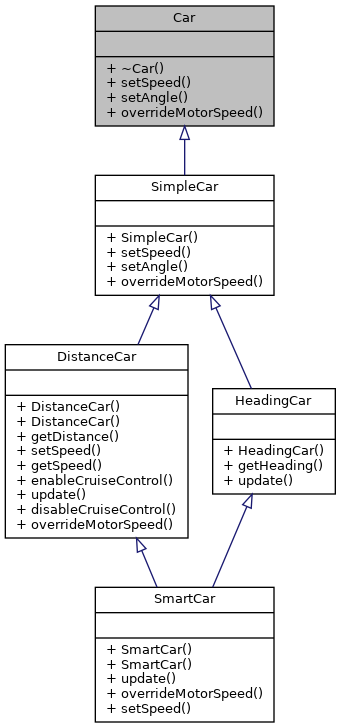
Inheritance diagram for Car:
Collaboration diagram for Car:
Public Member Functions | |
| virtual | ~Car ()=default |
| virtual void | setSpeed (float speed)=0 |
| Sets the car's driving speed. More... | |
| virtual void | setAngle (int angle)=0 |
| Set the car's driving angle. More... | |
| virtual void | overrideMotorSpeed (int firstMotorSpeed, int secondMotorSpeed)=0 |
| Set the motor speed individually as a percentage of the motors` total power. More... | |
Detailed Description
An interface to programmatically represent any kind of vehicle
Constructor & Destructor Documentation
◆ ~Car()
|
virtualdefault |
Member Function Documentation
◆ overrideMotorSpeed()
|
pure virtual |
Set the motor speed individually as a percentage of the motors` total power.
Use this with caution.
- Parameters
-
firstMotorSpeed The speed of the motor passed as first argument argument to the car's control class [-100, 100] secondMotorSpeed The speed of the motor passed as second argument argument to the car's control class [-100, 100]
Example:
car.overrideMotorSpeed(100, -100); // Make the car spin around clockwise
Implemented in DistanceCar, and SimpleCar.
◆ setAngle()
|
pure virtual |
Set the car's driving angle.
- Parameters
-
angle The car's angle in degrees [-90, 90]
Example:
car.setAngle(20);
Implemented in SimpleCar.
◆ setSpeed()
|
pure virtual |
Sets the car's driving speed.
- Parameters
-
speed The car's speed
Implemented in DistanceCar, and SimpleCar.
The documentation for this interface was generated from the following file:
- src/car/Car.hpp
