#include <ArduinoRuntime.hpp>
Public Member Functions | |
| void | setPinDirection (uint8_t pin, uint8_t direction) override |
Set pin direction, equivalent of pinMode in Arduino. More... | |
| void | setPinState (uint8_t pin, uint8_t state) override |
Set pin state, equivalent of digitalWrite in Arduino. More... | |
| int | getPinState (uint8_t pin) override |
Get the pin state, equivalent of digitalRead in Arduino. More... | |
| int | getAnalogPinState (uint8_t pin) override |
Get pin's analog (ADC) reading, equivalent of analogRead in Arduino. More... | |
| void | setPWM (uint8_t pin, int dutyCycle) override |
Set PWM state, equivalent of analogWrite in Arduino. More... | |
| void | i2cInit () override |
Initialize I2C bus as master, equivalent of Wire.begin in Arduino. More... | |
| void | i2cBeginTransmission (uint8_t address) override |
Initiate a transmission to the specified I2C slave device, equivalent of Wire.beginTransmission in Arduino. More... | |
| size_t | i2cWrite (uint8_t value) override |
Send the specified byte via i2c, equivalent of Wire.write in Arduino. More... | |
| uint8_t | i2cEndTransmission () override |
Ends a transmission to an I2C device equivalent of Wire.endTransmission in Arduino. More... | |
| uint8_t | i2cRequestFrom (uint8_t address, uint8_t numberOfBytes) override |
Request a number of bytes from the specified I2C slave, equivalent of Wire.requestFrom in Arduino. More... | |
| int | i2cAvailable () override |
Gets the number of bytes available to be retrieved, equivalent of Wire.availableO in Arduino. More... | |
| int | i2cRead () override |
Reads a byte from I2C bus, equivalent of Wire.read in Arduino. More... | |
| int8_t | pinToInterrupt (uint8_t pin) override |
Gets the interrupt number of the specified pin, equivalent of digitalPinToInterrupt in Arduino. More... | |
| unsigned long | currentTimeMillis () override |
Gets the amount of milliseconds since the microcontroller started running, equivalent of millis in Arduino. More... | |
| unsigned long | currentTimeMicros () override |
Gets the amount of microseconds since the microcontroller started running, equivalent of micros in Arduino. More... | |
| void | delayMillis (unsigned long milliseconds) override |
Block the execution for the specified number of milliseconds, equivalent of delay in Arduino. More... | |
| void | delayMicros (unsigned int microseconds) override |
Block the execution for the specified number of microseconds, equivalent of delayMicroseconds in Arduino. More... | |
| unsigned long | getPulseDuration (uint8_t pin, uint8_t state, unsigned long timeout) override |
Gets the incomming pulse length in microseconds starting from the nearest state, equivalent to pulseIn in Arduino. More... | |
| void | setInterrupt (uint8_t pin, InterruptCallback callback, int mode) override |
Enables an external hardware interrupt and provides a callback, equivalent to attachInterrupt in Arduino. More... | |
| uint8_t | getLowState () const override |
Get the runtime-specific value representing a logical LOW voltage state. More... | |
| uint8_t | getHighState () const override |
Get the runtime-specific value representing a logical HIGH voltage state. More... | |
| uint8_t | getOutputState () const override |
Get the runtime-specific value representing an OUTPUT pin state. More... | |
| uint8_t | getInputState () const override |
Get the runtime-specific value representing an INPUT pin state. More... | |
| int | getRisingEdgeMode () const override |
| Get the rising edge constant for setting an interrupt. More... | |
 Public Member Functions inherited from Runtime Public Member Functions inherited from Runtime | |
| virtual | ~Runtime ()=default |
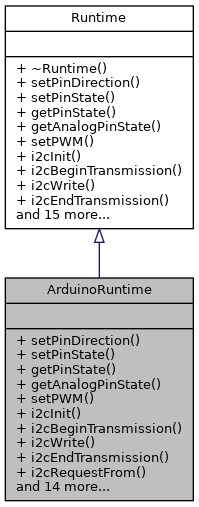
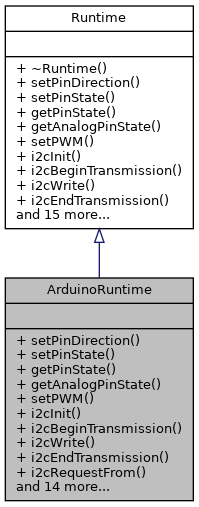
Detailed Description
The class to programatically represent the Arduino runtime environment or alternatively calls to the AVR and Arduino libraries.
Definition at line 11 of file ArduinoRuntime.hpp.
Member Function Documentation
◆ currentTimeMicros()
|
overridevirtual |
Gets the amount of microseconds since the microcontroller started running, equivalent of micros in Arduino.
- Returns
- Microseconds since beginning of operation
Implements Runtime.
Definition at line 88 of file ArduinoRuntime.cpp.
◆ currentTimeMillis()
|
overridevirtual |
Gets the amount of milliseconds since the microcontroller started running, equivalent of millis in Arduino.
- Returns
- Milliseconds since beginning of operation
Implements Runtime.
Definition at line 83 of file ArduinoRuntime.cpp.
◆ delayMicros()
|
overridevirtual |
Block the execution for the specified number of microseconds, equivalent of delayMicroseconds in Arduino.
- Parameters
-
microseconds How much time to block execution in microseconds
Implements Runtime.
Definition at line 98 of file ArduinoRuntime.cpp.
◆ delayMillis()
|
overridevirtual |
Block the execution for the specified number of milliseconds, equivalent of delay in Arduino.
- Parameters
-
milliseconds How much time to block execution in milliseconds
Implements Runtime.
Definition at line 93 of file ArduinoRuntime.cpp.
◆ getAnalogPinState()
|
overridevirtual |
Get pin's analog (ADC) reading, equivalent of analogRead in Arduino.
- Parameters
-
pin Pin to get ADC reading
- Returns
- ADC reading
Implements Runtime.
Definition at line 30 of file ArduinoRuntime.cpp.
◆ getHighState()
|
overridevirtual |
Get the runtime-specific value representing a logical HIGH voltage state.
- Returns
- uint8_t The
HIGHvalue
Implements Runtime.
Definition at line 118 of file ArduinoRuntime.cpp.
◆ getInputState()
|
overridevirtual |
Get the runtime-specific value representing an INPUT pin state.
- Returns
- uint8_t The
INPUTstate
Implements Runtime.
Definition at line 128 of file ArduinoRuntime.cpp.
◆ getLowState()
|
overridevirtual |
Get the runtime-specific value representing a logical LOW voltage state.
- Returns
- uint8_t The
LOWvalue
Implements Runtime.
Definition at line 113 of file ArduinoRuntime.cpp.
◆ getOutputState()
|
overridevirtual |
Get the runtime-specific value representing an OUTPUT pin state.
- Returns
- uint8_t The
OUTPUTstate
Implements Runtime.
Definition at line 123 of file ArduinoRuntime.cpp.
◆ getPinState()
|
overridevirtual |
Get the pin state, equivalent of digitalRead in Arduino.
- Parameters
-
pin Pin to get state
- Returns
- Pin's state (i.e. HIGH or LOW)
Implements Runtime.
Definition at line 25 of file ArduinoRuntime.cpp.
◆ getPulseDuration()
|
overridevirtual |
Gets the incomming pulse length in microseconds starting from the nearest state, equivalent to pulseIn in Arduino.
- Parameters
-
pin The pin to expect the pulse state The state ( HIGHorLOW) of the incoming pulsetimeout How long to wait for a complete pulse in microseconds
- Returns
0if no pulse arrived otherwise the pulse length in in microseconds
Implements Runtime.
Definition at line 103 of file ArduinoRuntime.cpp.
◆ getRisingEdgeMode()
|
overridevirtual |
Get the rising edge constant for setting an interrupt.
- Returns
- int The rising edge mode
Implements Runtime.
Definition at line 133 of file ArduinoRuntime.cpp.
◆ i2cAvailable()
|
overridevirtual |
Gets the number of bytes available to be retrieved, equivalent of Wire.availableO in Arduino.
- Returns
- The number of bytes available for reading
Implements Runtime.
Definition at line 68 of file ArduinoRuntime.cpp.
◆ i2cBeginTransmission()
|
overridevirtual |
Initiate a transmission to the specified I2C slave device, equivalent of Wire.beginTransmission in Arduino.
- Parameters
-
address I2C address to begin a transmission to
Implements Runtime.
Definition at line 48 of file ArduinoRuntime.cpp.
◆ i2cEndTransmission()
|
overridevirtual |
Ends a transmission to an I2C device equivalent of Wire.endTransmission in Arduino.
- Returns
- Transmission status
Implements Runtime.
Definition at line 58 of file ArduinoRuntime.cpp.
◆ i2cInit()
|
overridevirtual |
Initialize I2C bus as master, equivalent of Wire.begin in Arduino.
Implements Runtime.
Definition at line 43 of file ArduinoRuntime.cpp.
◆ i2cRead()
|
overridevirtual |
Reads a byte from I2C bus, equivalent of Wire.read in Arduino.
- Returns
- Byte read from I2C
Implements Runtime.
Definition at line 73 of file ArduinoRuntime.cpp.
◆ i2cRequestFrom()
|
overridevirtual |
Request a number of bytes from the specified I2C slave, equivalent of Wire.requestFrom in Arduino.
- Parameters
-
address I2C slave device address numberOfBytes Number of bytes to request
- Returns
- Number of bytes returned from the slave
Implements Runtime.
Definition at line 63 of file ArduinoRuntime.cpp.
◆ i2cWrite()
|
overridevirtual |
Send the specified byte via i2c, equivalent of Wire.write in Arduino.
- Parameters
-
value Byte to send
- Returns
- Number of bytes sent
Implements Runtime.
Definition at line 53 of file ArduinoRuntime.cpp.
◆ pinToInterrupt()
|
overridevirtual |
Gets the interrupt number of the specified pin, equivalent of digitalPinToInterrupt in Arduino.
- Parameters
-
pin Pin to get interrupt number
- Returns
- Interrupt number
Implements Runtime.
Definition at line 78 of file ArduinoRuntime.cpp.
◆ setInterrupt()
|
overridevirtual |
Enables an external hardware interrupt and provides a callback, equivalent to attachInterrupt in Arduino.
- Parameters
-
pin The interrupt pin to attach the interrupt callback The callback to be executed mode The state of the pin to run the callback
Implements Runtime.
Definition at line 108 of file ArduinoRuntime.cpp.
◆ setPinDirection()
|
overridevirtual |
Set pin direction, equivalent of pinMode in Arduino.
- Parameters
-
pin The pin to set direction direction The pin's direction (e.g. INPUT,OUTPUTetc)
Implements Runtime.
Definition at line 15 of file ArduinoRuntime.cpp.
◆ setPinState()
|
overridevirtual |
Set pin state, equivalent of digitalWrite in Arduino.
- Parameters
-
pin The pin to set state state The pin's state (i.e. HIGHorLOW)
Implements Runtime.
Definition at line 20 of file ArduinoRuntime.cpp.
◆ setPWM()
|
overridevirtual |
Set PWM state, equivalent of analogWrite in Arduino.
- Parameters
-
pin Pin to set PWM dutyCycle Duty cycle of PWM
Implements Runtime.
Definition at line 35 of file ArduinoRuntime.cpp.

The documentation for this class was generated from the following files:
- src/runtime/arduino_runtime/ArduinoRuntime.hpp
- src/runtime/arduino_runtime/ArduinoRuntime.cpp
