#include <BrushedMotor.hpp>
Public Member Functions | |
| BrushedMotor (Runtime &runtime, uint8_t forwardPin, uint8_t backwardPin, uint8_t enablePin) | |
| Constructs a brushed DC motor instance. More... | |
| BrushedMotor (Runtime &runtime, BrushedMotorPins pins) | |
| Constructs a brushed DC motor instance. More... | |
| void | setSpeed (int speed) override |
| Sets the motor speed and direction as the percentage of the maximum possible speed, where the sign of the argument represents the direction. More... | |
 Public Member Functions inherited from Motor Public Member Functions inherited from Motor | |
| virtual | ~Motor ()=default |
Detailed Description
A brushed motor is controlled via two wires where the flow of current determines the direction of rotation and the duty cycle the speed.
For their control, we will assume the existince of a half-bridge such as the L293D chip where three signals are needed, two for determining the direction and another for determining the speed.
Definition at line 41 of file BrushedMotor.hpp.
Constructor & Destructor Documentation
◆ BrushedMotor() [1/2]
| BrushedMotor::BrushedMotor | ( | Runtime & | runtime, |
| uint8_t | forwardPin, | ||
| uint8_t | backwardPin, | ||
| uint8_t | enablePin | ||
| ) |
Constructs a brushed DC motor instance.
- Parameters
-
runtime The runtime environment you want to run the class for forwardPin The direction pin that when set to HIGH makes the motor spin forward backwardPin The direction pin that when set to HIGH makes the motor spin forward enablePin The pin that controls the motor's speed
Example:
Definition at line 13 of file BrushedMotor.cpp.
◆ BrushedMotor() [2/2]
| BrushedMotor::BrushedMotor | ( | Runtime & | runtime, |
| BrushedMotorPins | pins | ||
| ) |
Constructs a brushed DC motor instance.
- Parameters
-
runtime The runtime environment you want to run the class for pins The BrushedMotorPinsobject with the pins of the motor
Example:
Definition at line 27 of file BrushedMotor.cpp.
Member Function Documentation
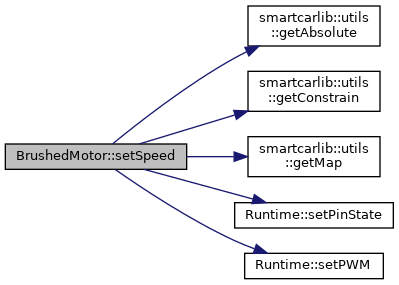
◆ setSpeed()
|
overridevirtual |
Sets the motor speed and direction as the percentage of the maximum possible speed, where the sign of the argument represents the direction.
- Parameters
-
speed The speed and direction within the range of [-100, 100]. -100means that the motor is spinning at full speed towards the direction we have defined as backward.100interpreted as full speed forward.0means that the motor is at its idle/neutral state.
Example:
Implements Motor.
Definition at line 32 of file BrushedMotor.cpp.
The documentation for this class was generated from the following files:
- src/motor/analog/pwm/BrushedMotor.hpp
- src/motor/analog/pwm/BrushedMotor.cpp
