#include <AckermanControl.hpp>
Public Member Functions | |
| AckermanControl (Motor &steering, Motor &throttling) | |
| Constructs an Ackerman way of controlling the vehicle. More... | |
| void | setAngle (int angle) override |
| Sets the driving angle in degrees [-90, 90]. More... | |
| void | setSpeed (int speed) override |
| Sets the driving speed as percentage of the total motor speed where the sign represents the direction of movement [-100, 100]. More... | |
| void | overrideMotorSpeed (int firstMotorSpeed, int secondMotorSpeed) override |
| Set the motor speed individually as a percentage of the motors` total power. More... | |
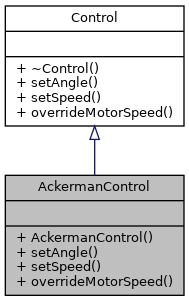
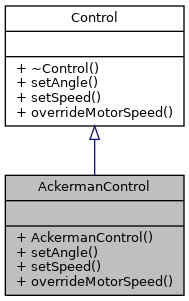
 Public Member Functions inherited from Control Public Member Functions inherited from Control | |
| virtual | ~Control ()=default |
Detailed Description
Class to represent controling a vehicle by changing the angle of the front wheels, like a common car.
Definition at line 11 of file AckermanControl.hpp.
Constructor & Destructor Documentation
◆ AckermanControl()
Constructs an Ackerman way of controlling the vehicle.
- Parameters
-
steering The motor that controls the steering throttling The motor that controls the throttling
Example:
Definition at line 9 of file AckermanControl.cpp.
Member Function Documentation
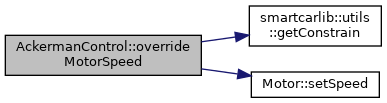
◆ overrideMotorSpeed()
|
overridevirtual |
Set the motor speed individually as a percentage of the motors` total power.
Use this with caution.
- Parameters
-
firstMotorSpeed The first motor speed [-100, 100] secondMotorSpeed The second motor speed [-100, 100]
Example:
Implements Control.
Definition at line 31 of file AckermanControl.cpp.
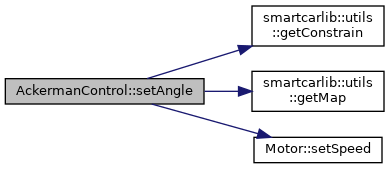
◆ setAngle()
|
overridevirtual |
Sets the driving angle in degrees [-90, 90].
- Parameters
-
angle The driving angle
Example:
Implements Control.
Definition at line 15 of file AckermanControl.cpp.
◆ setSpeed()
|
overridevirtual |
Sets the driving speed as percentage of the total motor speed where the sign represents the direction of movement [-100, 100].
- Parameters
-
speed The driving speed
Example:
Implements Control.
Definition at line 25 of file AckermanControl.cpp.
The documentation for this class was generated from the following files:
- src/control/ackerman/AckermanControl.hpp
- src/control/ackerman/AckermanControl.cpp
