#include <ServoMotor.hpp>
Inheritance diagram for ServoMotor:
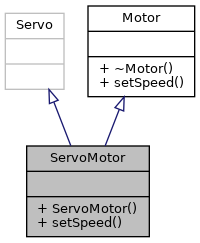
Collaboration diagram for ServoMotor:

Public Member Functions | |
| ServoMotor (uint8_t controlPin, int minPulseLength=smartcarlib::constants::servomotor::kDefaultMinPulseLength, int idlePulseLength=smartcarlib::constants::servomotor::kDefaultIdlePulseLength, int maxPulseLength=smartcarlib::constants::servomotor::kDefaultMaxPulseLength) | |
| Constructs a servo motor. More... | |
| void | setSpeed (int speed) override |
| Sets the motor speed and direction as the percentage of the maximum possible speed, where the sign of the argument represents the direction. More... | |
 Public Member Functions inherited from Motor Public Member Functions inherited from Motor | |
| virtual | ~Motor ()=default |
Detailed Description
A motor that is controlled via the length of pulses that are sent to it through a single signal line. It can be either a traditional servo motor that controls a shaft (e.g. for steering) or an Electronic Speed Controller (ESC) that interpets speed in the same manner and controls a (typically brushless) motor.
Definition at line 29 of file ServoMotor.hpp.
Constructor & Destructor Documentation
◆ ServoMotor()
| ServoMotor::ServoMotor | ( | uint8_t | controlPin, |
| int | minPulseLength = smartcarlib::constants::servomotor::kDefaultMinPulseLength, |
||
| int | idlePulseLength = smartcarlib::constants::servomotor::kDefaultIdlePulseLength, |
||
| int | maxPulseLength = smartcarlib::constants::servomotor::kDefaultMaxPulseLength |
||
| ) |
Constructs a servo motor.
- Parameters
-
controlPin The pin controlling the speed of the motor minPulseLength The motor's minimum pulse length in microseconds idlePulseLength The pulse length that the motor is idle in microseconds maxPulseLength The motor's maximum pulse length in microseconds
Example:
const unsigned short ESC_PIN = 7;
ServoMotor esc(ESC_PIN);
Definition at line 7 of file ServoMotor.cpp.
Member Function Documentation
◆ setSpeed()
|
overridevirtual |
Sets the motor speed and direction as the percentage of the maximum possible speed, where the sign of the argument represents the direction.
- Parameters
-
speed The speed and direction within the range of [-100, 100]. -100means that the motor is spinning at full speed towards the direction we have defined as backward.100interpreted as full speed forward.0means that the motor is at its idle/neutral state.
Example:
motor.setSpeed(0); // Stop the motor
Implements Motor.
Definition at line 19 of file ServoMotor.cpp.
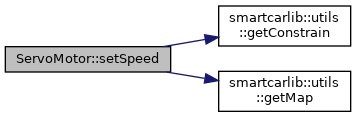
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- src/motor/digital/servo/ServoMotor.hpp
- src/motor/digital/servo/ServoMotor.cpp
