#include <SR04.hpp>
Inheritance diagram for SR04:
Collaboration diagram for SR04:
Public Member Functions | |
| SR04 (Runtime &runtime, uint8_t triggerPin, uint8_t echoPin, unsigned int maxDistance=smartcarlib::constants::sr04::kDefaultMaxDistance) | |
| Constructs an SR04 ultrasonic sensor. More... | |
| unsigned int | getDistance () override |
| Gets the distance measured by the sensor in centimeters. More... | |
| unsigned int | getMedianDistance (uint8_t iterations=smartcarlib::constants::sr04::kDefaultIterations) override |
| Gets the median distance from the specified number of measurements. More... | |
 Public Member Functions inherited from DistanceSensor Public Member Functions inherited from DistanceSensor | |
| virtual | ~DistanceSensor ()=default |
Detailed Description
The SR04 (aka SRF05) is an inexpensive ultrasonic sensor controllable over two digital pins.
For a more advanced solution (faster readings, not using pulseIn, non-blocking measurements etc) please use the NewPing library.
Constructor & Destructor Documentation
◆ SR04()
| SR04::SR04 | ( | Runtime & | runtime, |
| uint8_t | triggerPin, | ||
| uint8_t | echoPin, | ||
| unsigned int | maxDistance = smartcarlib::constants::sr04::kDefaultMaxDistance |
||
| ) |
Constructs an SR04 ultrasonic sensor.
- Parameters
-
runtime The runtime environment you want to run the class for triggerPin The pin to produce the trigger signal echoPin The pin to receive the echo signal maxDistance The maximum measurement distance in centimeters
Example:
unsigned short TRIGGER_PIN = 6;
unsigned short ECHO_PIN = 7;
ArduinoRuntime arduinoRuntime;
SR04 sr04(arduinoRuntime, TRIGGER_PIN, ECHO_PIN);
Member Function Documentation
◆ getDistance()
|
overridevirtual |
Gets the distance measured by the sensor in centimeters.
Calling this might trigger a new measurement by the sensor.
- Returns
0if an error has occured, otherwise the measured distance in centimeters
Example:
unsigned int distance = sensor.getDistance();
Implements DistanceSensor.
Definition at line 40 of file SR04.cpp.
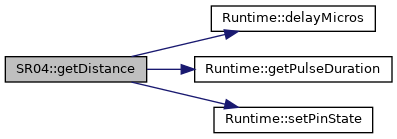
Here is the call graph for this function:
Here is the caller graph for this function:

◆ getMedianDistance()
|
overridevirtual |
Gets the median distance from the specified number of measurements.
- Parameters
-
iterations Number of measurements to conduct (at most kMaxMedianMeasurements)
- Returns
- The median of the conducted measurements or an error value if the number of iterations is
0or larger thankMaxMedianMeasurements
Example:
// Get the median of `10` measurements
unsigned int distance = sensor.getMedianDistance(10);
Implements DistanceSensor.
Definition at line 61 of file SR04.cpp.
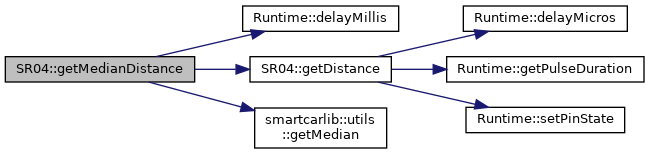
Here is the call graph for this function:
The documentation for this class was generated from the following files:
