#include <InfraredAnalogSensor.hpp>
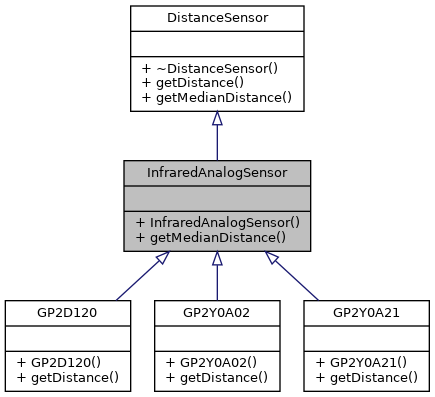
Inheritance diagram for InfraredAnalogSensor:
Collaboration diagram for InfraredAnalogSensor:
Public Member Functions | |
| InfraredAnalogSensor (Runtime &runtime) | |
| unsigned int | getMedianDistance (uint8_t iterations=smartcarlib::constants::analogInfraredSensor::kDefaultIterations) override |
| Gets the median distance from the specified number of measurements. More... | |
 Public Member Functions inherited from DistanceSensor Public Member Functions inherited from DistanceSensor | |
| virtual | ~DistanceSensor ()=default |
| virtual unsigned int | getDistance ()=0 |
| Gets the distance measured by the sensor in centimeters. More... | |
Detailed Description
An abstract class to represent the various infrared analog sensors. These sensors are able to conduct measurements by emiting an analog signal that can be read by a microcontroller through the ADC.
Definition at line 25 of file InfraredAnalogSensor.hpp.
Constructor & Destructor Documentation
◆ InfraredAnalogSensor()
| InfraredAnalogSensor::InfraredAnalogSensor | ( | Runtime & | runtime | ) |
Definition at line 12 of file InfraredAnalogSensor.cpp.
Member Function Documentation
◆ getMedianDistance()
|
overridevirtual |
Gets the median distance from the specified number of measurements.
- Parameters
-
iterations Number of measurements to conduct (at most kMaxMedianMeasurements)
- Returns
- The median of the conducted measurements or an error value if the number of iterations is
0or larger thankMaxMedianMeasurements
Example:
// Get the median of `10` measurements
unsigned int distance = sensor.getMedianDistance(10);
Implements DistanceSensor.
Definition at line 17 of file InfraredAnalogSensor.cpp.
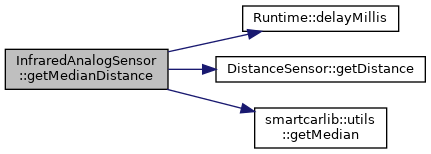
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- src/sensors/distance/infrared/analog/InfraredAnalogSensor.hpp
- src/sensors/distance/infrared/analog/InfraredAnalogSensor.cpp
