#include <Odometer.hpp>
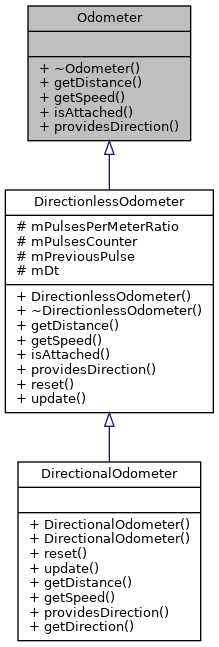
Inheritance diagram for Odometer:
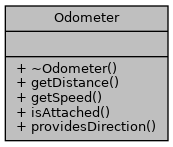
Collaboration diagram for Odometer:
Public Member Functions | |
| virtual | ~Odometer ()=default |
| virtual long | getDistance ()=0 |
| Returns the travelled distance in centimeters where sign can indicate direction if there is hardware support. More... | |
| virtual float | getSpeed ()=0 |
| Returns the current speed in meters/sec where sign can indicate direction if there is hardware support. More... | |
| virtual bool | isAttached () const =0 |
| Returns whether the sensor has been properly attached. More... | |
| virtual bool | providesDirection () const =0 |
| Return whether the sensor is capable of inferring the direction of movement. More... | |
Detailed Description
An interface to programmatically represent all odometers
Definition at line 26 of file Odometer.hpp.
Constructor & Destructor Documentation
◆ ~Odometer()
|
virtualdefault |
Member Function Documentation
◆ getDistance()
|
pure virtual |
Returns the travelled distance in centimeters where sign can indicate direction if there is hardware support.
- Returns
- The travelled distance in centimeters
Example:
unsigned long travelledDistance = odometer.getDistance();
Implemented in DirectionalOdometer, and DirectionlessOdometer.
Here is the caller graph for this function:

◆ getSpeed()
|
pure virtual |
Returns the current speed in meters/sec where sign can indicate direction if there is hardware support.
- Returns
- The speed in meters/sec
Example:
float speed = odometer.getSpeed();
Implemented in DirectionalOdometer, and DirectionlessOdometer.
Here is the caller graph for this function:

◆ isAttached()
|
pure virtual |
Returns whether the sensor has been properly attached.
- Returns
- True if Odometer::attach has been successfully run, false otherwise Example: bool hasAttachBeenRun = odometer.isAttached();
Implemented in DirectionlessOdometer.
◆ providesDirection()
|
pure virtual |
Return whether the sensor is capable of inferring the direction of movement.
- Returns
trueif the sensor supports direction readings otherwisefalse
Example:
bool directional = odometer.providesDirection();
Implemented in DirectionalOdometer, and DirectionlessOdometer.
The documentation for this interface was generated from the following file:
- src/sensors/odometer/Odometer.hpp
